Non-linear RGB math operations will inevitably cause hue shifts outside of white\gray (the middle point of the triangle). Easy to conceptualize in your head, if you have RGB [0.1, 0.1, 0.1] no RGB math operation will result in a number different from RGB[X,X,X]. That means there will be no hue shift. Canon and Red shift their white point towards skin tones so that grading operations are less likely to manipulate skin tones.
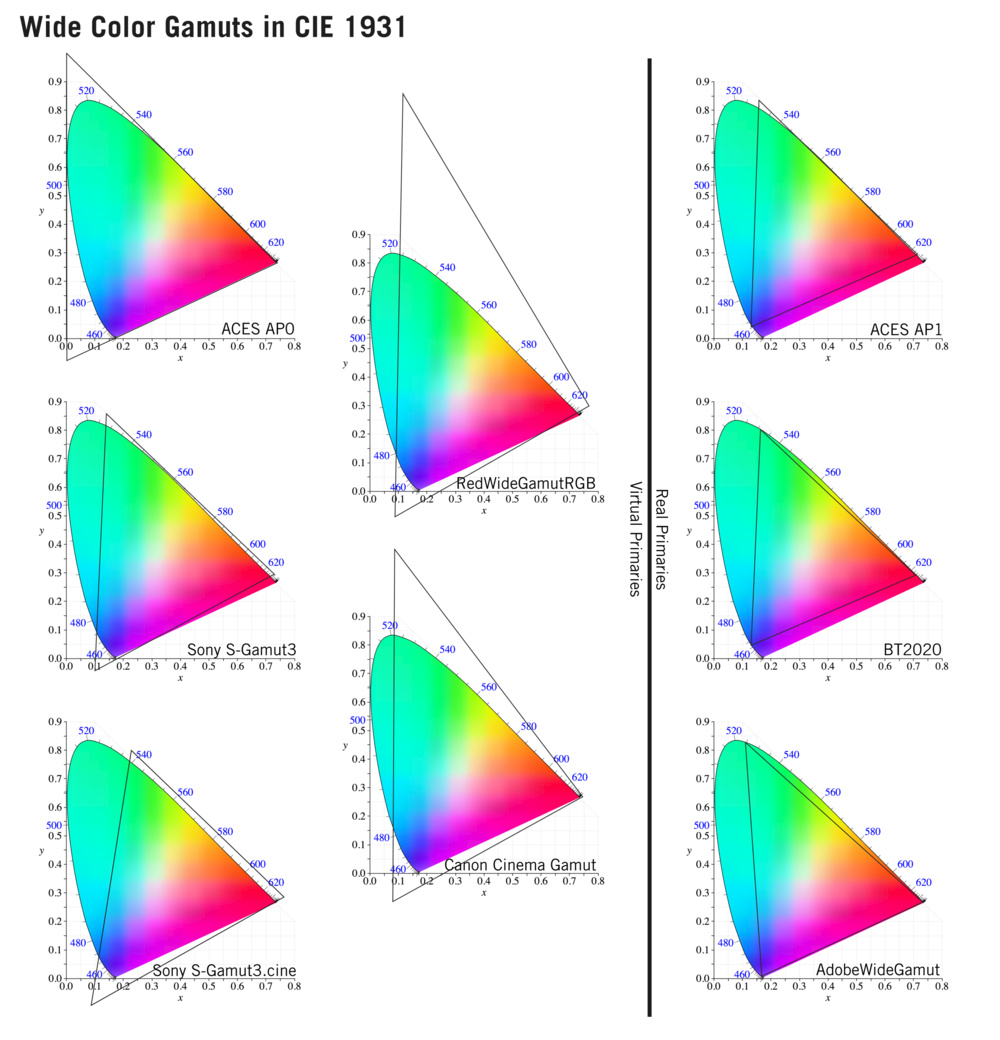
Conversely imaginary primaries like AP0, RedWideGammut and Canon all cause problems with physical simulations of light like 3D rendering in VFX. In AP1 or Rec2020 imagine you have a pure green wall that is 50% reflective. That means you want a white photon with an “energy of 100%” to be represented as RGB[1.0,1.0,1.0]. It hits your pure green 50% absorbent wall RGB[0.0, 0.5, 0.0] and you multiply to simulate absorbtion and reflectance. And you end up with RGB[1.0,1.0,1.0] light * RGB[0.0, 0.5, 0.0] wall = RGB[0.0, 0.5, 0.0] Let’s say it bounces 2 more times. We just multiply by the wall’s color 2 more times. You end up with RGB[0.0, 0.125, 0.0] light. It reflected green exclusively and absorbed all of the red and blue. 3 bounces of 50% absorbant walls resulted in what you would expect 0.5^3 = 12.5% of the original light.
AP0 messes this up. Your same 50%, pure green wall (pure 530nm wavelength) in AP0 is RGB[0.07, 0.42, 0.01]. Multiply by “white” light and we get RGB[0.07, 0.42, 0.01]. Multiply 2 more bounces and we’re at RGB[0.00044, 0.07, 0.0000002]. When we convert that back into “real” AP1 primaries we’re at RGB[-0.02, 0.09, -0.002] or 9% of the original light. Because full saturation primaries aren’t actually a ratio of wavelengths you end up with 25% less light than you should have by doing the operations in an imaginary color space. Also you end up with negative red and negative blue values. There is no such thing as “negative” filtration in the physical world so we just clamp those before they cause problems. It’s created a color that is more pure than a hypothetical pure laser light source. An infinite stack of color filters can’t create a light more pure than single wavelength of light.
“Energy Conservation” is an important concept in 3D rendering. If you emit 10,000 lumens of light into a scene, you want the materials to absorb or reflect 10,000 lumens of light. When you have imaginary primaries as demonstrated above, you easily get into situations where at best you losing energy. That leads people to be tempted to start cheating reflectance values higher in their shaders and breaking the physicality of the scene.